Coesistenza sicura di robot e umani (“See me, feel me, touch me …”) Robot KUKA LW4
Utenti e robot devono spesso condividere lo spazio di lavoro e talvolta anche collaborare fisicamente entrando in contatto e scambiando forze. In questo scenario, la sicurezza dell’essere umano è di cruciale importanza. Il sistema proposto in questa demo può utilizzare un sensore di visione, che permette di avere informazioni sulle distanze tra il robot e tutto ciò che lo circonda. Tali informazioni sono utilizzate per evitare le collisioni tra robot e qualsiasi ostacolo o persona nella sua area di lavoro.
Cosa vedrai
si mostrerà cosa succede se una persona interferisce fisicamente con il movimento programmato del robot. Il robot “sente” il contatto e reagisce fermandosi in sicurezza, per poi riprendere il movimento originario
Se il robot è anche collegato a una telecamera o a un sensore di profondità (ad esempio, una RGB-D Kinect) può rilevare la vicinanza della persona ed evitare la collisione, oppure fermarsi o ancora “rimbalzare” al seguito del contatto
dopo aver mostrato il funzionamento del sistema di controllo del robot, gli studenti/visitatori saranno invitati a provare a loro volta
turni
10:00
10:40
11:20
12:00
12:40
14:20
15:00
15:40
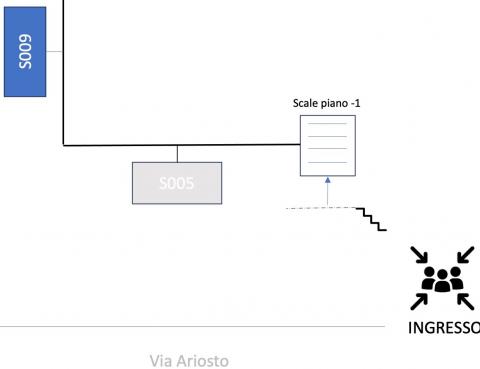
Mappa
Image