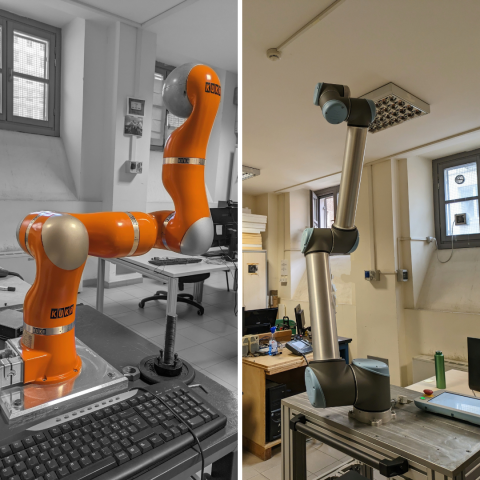
“Uno, nessuno e centomila” - Universal Robots UR10
Un manipolatore robotico si può muovere nello “spazio dei giunti” (comandando una posizione angolare a ogni giunto) oppure nello “spazio cartesiano” (comandando la posizione e l'orientamento dell’organo terminale). A una posizione nello spazio dei giunti corrisponde una e una sola posizione e orientamento dell’organo terminale (problema cinematico diretto). Ma quante posizioni dei giunti corrispondono a una data posizione e orientamento dell’organo terminale (problema cinematico inverso)? Una, nessuna... o centomila?
Il robot verrà guidato tramite un teach-box, assumendo tutte le configurazioni alternative che realizzano la stessa posizione e orientamento (posa) dell’organo terminale. Verrà poi spostato in prossimità di configurazioni cosiddette “singolari”, dove non è possibile comandare i movimenti in certe direzioni cartesiane mentre ci sono infiniti modi per muovere il robot in altre direzioni.