“See me, feel me, touch me …” - Robot Franka Emika R3
Utenti e robot devono spesso condividere lo spazio di lavoro e talvolta anche collaborare fisicamente entrando in contatto e scambiando forze. In questo scenario, la sicurezza dell’essere umano è di cruciale importanza. Il robot potrebbe utilizzare un sistema di visione per evitare collisioni, ma in questa demo si usa un metodo percettivo che non impiega alcun sensore esterno. L’algoritmo permette al robot di “sentire” il contatto con qualsiasi cosa (ostacolo o persona) venga toccata durante il suo movimento.
Oppure di poter "spostare a mano" il robot in qualsiasi posizione, come fosse in assenza di gravità.
Cosa vedrai
Cosa succede se si prova a fermare fisicamente il movimento del robot? Il robot riconosce il contatto e reagisce dolcemente arrestandosi in sicurezza, per poi riprendere il movimento programmato.
Dopo aver visto il funzionamento di questo sistema di controllo del robot, potrete provare di persona.
turni
10:00
10:20
10:40
11:00
11:20
11:40
12:00
12:20
12:40
13:00
14:00
14:20
14:40
15:00
15:20
15:40
16:00
16:20
16:40
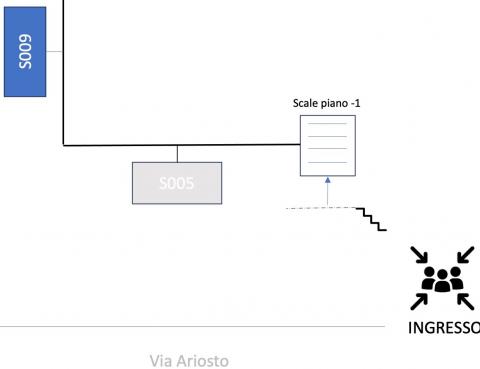
Mappa
Image